Convolutional Neural Networks

Getting Started
![]()
![]()
Up until transformers, convolutions were the state of the art in computer vision.
In many ways and applications they still are!
Large Language Models, which are what we’ll focus on the rest of the series after this lecture, are really good at ordered, *tokenized data. But there is lots of data that isn’t implicitly ordered like images, and their more general cousins graphs.
Today’s lecture focuses on computer vision models, and particularly on convolutional neural networks. There are a ton of applications you can do with these, and not nearly enough time to get into them. Check out the extra references file to see some publications to get you started if you want to learn more.
Tip: this notebook is much faster on the GPU!
Convolutional Networks: A brief historical context
Performance on ImageNet over time[^image-net-historical]
import logging
import ambivalent
import ezpz
import matplotlib.pyplot as plt
import seaborn as sns
from rich import print
sns.set_context("notebook")
# sns.set(rc={"figure.dpi": 400, "savefig.dpi": 400})
plt.style.use(ambivalent.STYLES["ambivalent"])
plt.rcParams["figure.figsize"] = [6.4, 4.8]
plt.rcParams["figure.facecolor"] = "none"[2025-08-04 12:29:17,617339][I][ezpz/__init__:265:ezpz] Setting logging level to 'INFO' on 'RANK == 0'
[2025-08-04 12:29:17,619494][I][ezpz/__init__:266:ezpz] Setting logging level to 'CRITICAL' on all others 'RANK != 0'
# Data
data = {2010: 28, 2011: 26, 2012: 16, 2013: 12, 2014: 7, 2015: 3, 2016: 2.3, 2017: 2.1}
human_error_rate = 5
plt.bar(list(data.keys()), list(data.values()), color="blue")
plt.axhline(y=human_error_rate, color="red", linestyle="--", label="Human error rate")
plt.xlabel("Year")
plt.ylabel("ImageNet Visual Recognition Error Rate (%)")
plt.title("ImageNet Error Rates Over Time")
plt.legend()
plt.show()
Convolutional Building Blocks
We’re going to go through some examples of building blocks for convolutional networks. To help illustate some of these, let’s use an image for examples:

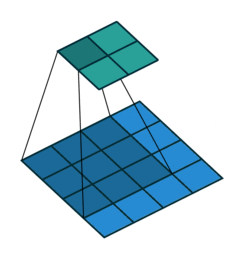
Convolutions
\begin{equation} G\left[m, n\right] = \left(f \star h\right)\left[m, n\right] = \sum_{j} \sum_{k} h\left[j, k\right] f\left[m - j, n - k\right] \end{equation}
Convolutions are a restriction of - and a specialization of - dense linear layers. A convolution of an image produces another image, and each output pixel is a function of only it’s local neighborhood of points. This is called an inductive bias and is a big reason why convolutions work for image data: neighboring pixels are correlated and you can operate on just those pixels at a time.
G\left[m, n\right] = \left(f \star h\right)\left[m, n\right] = \sum_{j} \sum_{k} h\left[j, k\right] f\left[m - j, n - k\right]
See examples of convolutions here
# Let's apply a convolution to the ALCF Staff photo:
alcf_tensor = torchvision.transforms.ToTensor()(alcf_image)
# Reshape the tensor to have a batch size of 1:
alcf_tensor = alcf_tensor.reshape((1,) + alcf_tensor.shape)
# Create a random convolution:
# shape is: (channels_in, channels_out, kernel_x, kernel_y)
conv_random = torch.rand((3, 3, 15, 15))
alcf_rand = torch.nn.functional.conv2d(alcf_tensor, conv_random)
alcf_rand = (1.0 / alcf_rand.max()) * alcf_rand
print(alcf_rand.shape)
alcf_rand = alcf_rand.reshape(alcf_rand.shape[1:])
print(alcf_tensor.shape)
rand_image = alcf_rand.permute((1, 2, 0)).cpu()
fx, fy = plt.rcParamsDefault["figure.figsize"]
figure = plt.figure(figsize=(1.5 * fx, 1.5 * fy))
_ = plt.imshow(rand_image)torch.Size([1, 3, 1111, 1986])
torch.Size([1, 3, 1125, 2000])

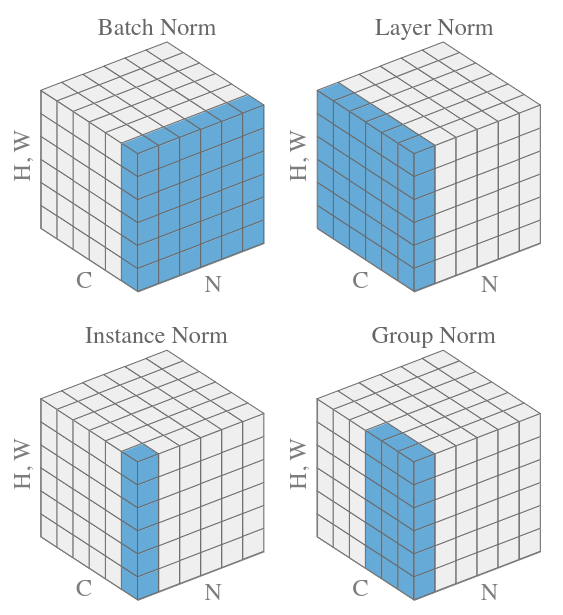
Normalization
Normalization is the act of transforming the mean and moment of your data to standard values (usually 0.0 and 1.0). It’s particularly useful in machine learning since it stabilizes training, and allows higher learning rates.
# Let's apply a normalization to the ALCF Staff photo:
alcf_tensor = torchvision.transforms.ToTensor()(alcf_image)
# Reshape the tensor to have a batch size of 1:
alcf_tensor = alcf_tensor.reshape((1,) + alcf_tensor.shape)
alcf_rand = torch.nn.functional.normalize(alcf_tensor)
alcf_rand = alcf_rand.reshape(alcf_rand.shape[1:])
print(alcf_tensor.shape)
rand_image = alcf_rand.permute((1, 2, 0)).cpu()
fx, fy = plt.rcParamsDefault["figure.figsize"]
figure = plt.figure(figsize=(1.5 * fx, 1.5 * fy))
_ = plt.imshow(rand_image)torch.Size([1, 3, 1125, 2000])

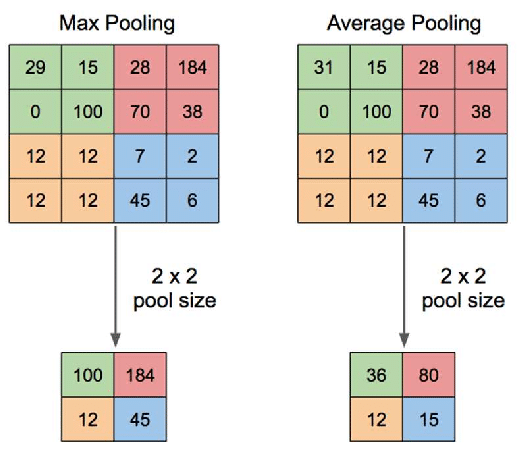
Downsampling (And upsampling)
Downsampling is a critical component of convolutional and many vision models. Because of the local-only nature of convolutional filters, learning large-range features can be too slow for convergence. Downsampling of layers can bring information from far away closer, effectively changing what it means to be “local” as the input to a convolution.
# Let's apply a normalization to the ALCF Staff photo:
alcf_tensor = torchvision.transforms.ToTensor()(alcf_image)
# Reshape the tensor to have a batch size of 1:
alcf_tensor = alcf_tensor.reshape((1,) + alcf_tensor.shape)
alcf_rand = torch.nn.functional.max_pool2d(alcf_tensor, 2)
alcf_rand = alcf_rand.reshape(alcf_rand.shape[1:])
print(alcf_tensor.shape)
rand_image = alcf_rand.permute((1, 2, 0)).cpu()
fx, fy = plt.rcParamsDefault["figure.figsize"]
figure = plt.figure(figsize=(1.5 * fx, 1.5 * fy))
_ = plt.imshow(rand_image)torch.Size([1, 3, 1125, 2000])

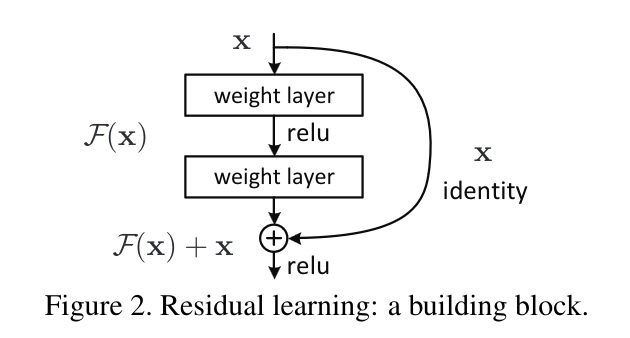
Residual Connections
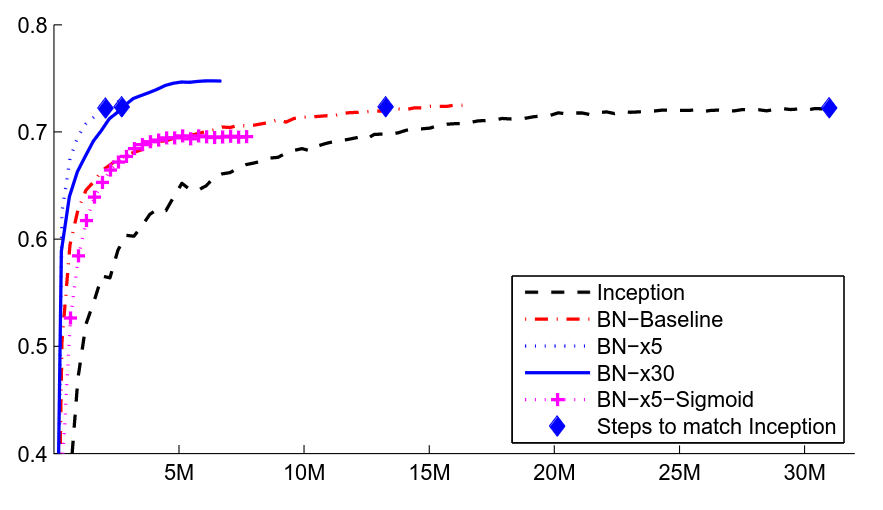
One issue, quickly encountered when making convolutional networks deeper and deeper, is the “Vanishing Gradients” problem. As layers were stacked on top of each other, the size of updates dimished at the earlier layers of a convolutional network. The paper “Deep Residual Learning for Image Recognition” solved this by introduction “residual connections” as skip layers.
Reference: Deep Residual Learning for Image Recognition
Compare the performance of the models before and after the introduction of these layers:
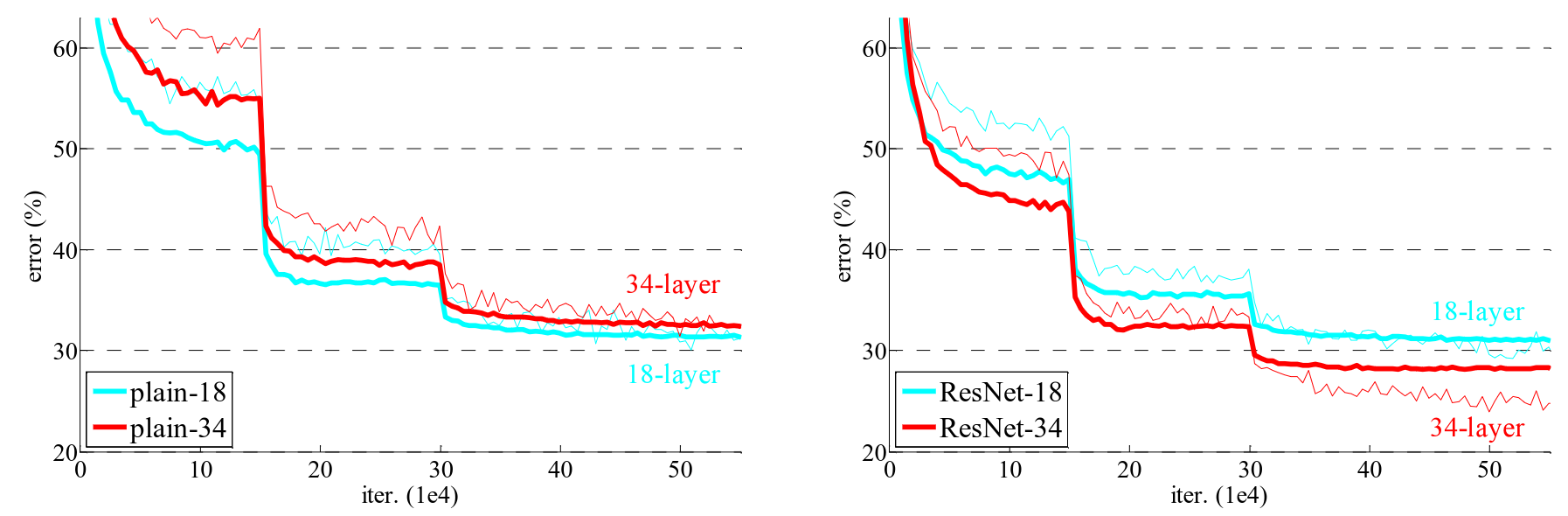
If you have time to read only one paper on computer vision, make it this one! Resnet was the first model to beat human accuracy on ImageNet and is one of the most impactful papers in AI ever published.
Building a ConvNet
In this section we’ll build and apply a conv net to the mnist dataset. The layers here are loosely based off of the ConvNext architecture. Why? Because we’re getting into LLM’s soon, and this ConvNet uses LLM features. ConvNext is an update to the ResNet architecture that outperforms it.
The dataset here is CIFAR-10 - slightly harder than MNIST but still relatively easy and computationally tractable.
batch_size = 16
from torchvision import transforms
transform = transforms.Compose(
[transforms.ToTensor(), transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))],
)
training_data = torchvision.datasets.CIFAR10(
root="data",
download=True,
train=True,
transform=transform,
)
test_data = torchvision.datasets.CIFAR10(
root="data",
download=True,
train=False,
transform=transform,
)
training_data, validation_data = torch.utils.data.random_split(
training_data, [0.8, 0.2], generator=torch.Generator().manual_seed(55)
)
# The dataloader makes our dataset iterable
train_dataloader = torch.utils.data.DataLoader(
training_data,
batch_size=batch_size,
pin_memory=True,
shuffle=True,
num_workers=0,
)
val_dataloader = torch.utils.data.DataLoader(
validation_data,
batch_size=batch_size,
pin_memory=True,
shuffle=False,
num_workers=0,
)
classes = (
"plane",
"car",
"bird",
"cat",
"deer",
"dog",
"frog",
"horse",
"ship",
"truck",
)[2025-08-04 12:29:50,397009][W][matplotlib/image:661] Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers). Got range [-0.9764706..0.96862745].

import numpy as np
def imshow(img):
img = img / 2 + 0.5 # unnormalize
npimg = img.numpy()
plt.imshow(np.transpose(npimg, (1, 2, 0)))
plt.show()
# get some random training images
images, labels = next(iter(train_dataloader))
fx, fy = plt.rcParamsDefault["figure.figsize"]
fig = plt.figure(figsize=(2 * fx, 4 * fy))
# show images
imshow(torchvision.utils.make_grid(images))
# print labels
print("\n" + " ".join(f"{classes[labels[j]]:5s}" for j in range(batch_size)))
dog deer cat truck car horse plane dog car bird bird frog deer bird car plane
This code below is important as our models get bigger: this is wrapping the pytorch data loaders to put the data onto the GPU!
dev = torch.device("cuda") if torch.cuda.is_available() else torch.device("cpu")
def preprocess(x, y):
# CIFAR-10 is *color* images so 3 layers!
x = x.view(-1, 3, 32, 32)
# y = y.to(dtype)
return (x.to(dev), y.to(dev))
class WrappedDataLoader:
def __init__(self, dl, func):
self.dl = dl
self.func = func
def __len__(self):
return len(self.dl)
def __iter__(self):
for b in self.dl:
yield (self.func(*b))
train_dataloader = WrappedDataLoader(train_dataloader, preprocess)
val_dataloader = WrappedDataLoader(val_dataloader, preprocess)from typing import Optional
from torch import nn
class Downsampler(nn.Module):
def __init__(self, in_channels, out_channels, shape, stride=2):
super(Downsampler, self).__init__()
self.norm = nn.LayerNorm([in_channels, *shape])
self.downsample = nn.Conv2d(
in_channels=in_channels,
out_channels=out_channels,
kernel_size=stride,
stride=stride,
)
def forward(self, inputs):
return self.downsample(self.norm(inputs))
class ConvNextBlock(nn.Module):
"""This block of operations is loosely based on this paper:"""
def __init__(
self,
in_channels,
shape,
kernel_size: Optional[None] = None,
):
super(ConvNextBlock, self).__init__()
# Depthwise, seperable convolution with a large number of output filters:
kernel_size = [7, 7] if kernel_size is None else kernel_size
self.conv1 = nn.Conv2d(
in_channels=in_channels,
out_channels=in_channels,
groups=in_channels,
kernel_size=kernel_size,
padding="same",
)
self.norm = nn.LayerNorm([in_channels, *shape])
# Two more convolutions:
self.conv2 = nn.Conv2d(
in_channels=in_channels, out_channels=4 * in_channels, kernel_size=1
)
self.conv3 = nn.Conv2d(
in_channels=4 * in_channels, out_channels=in_channels, kernel_size=1
)
def forward(self, inputs):
x = self.conv1(inputs)
# The normalization layer:
x = self.norm(x)
x = self.conv2(x)
# The non-linear activation layer:
x = torch.nn.functional.gelu(x)
x = self.conv3(x)
# This makes it a residual network:
return x + inputs
class Classifier(nn.Module):
def __init__(
self,
n_initial_filters,
n_stages,
blocks_per_stage,
kernel_size: Optional[None] = None,
):
super(Classifier, self).__init__()
# This is a downsampling convolution that will produce patches of output.
# This is similar to what vision transformers do to tokenize the images.
self.stem = nn.Conv2d(
in_channels=3, out_channels=n_initial_filters, kernel_size=1, stride=1
)
current_shape = [32, 32]
self.norm1 = nn.LayerNorm([n_initial_filters, *current_shape])
# self.norm1 = WrappedLayerNorm()
current_n_filters = n_initial_filters
self.layers = nn.Sequential()
for i, n_blocks in enumerate(range(n_stages)):
# Add a convnext block series:
for _ in range(blocks_per_stage):
self.layers.append(
ConvNextBlock(
in_channels=current_n_filters,
shape=current_shape,
kernel_size=kernel_size,
)
)
# Add a downsampling layer:
if i != n_stages - 1:
# Skip downsampling if it's the last layer!
self.layers.append(
Downsampler(
in_channels=current_n_filters,
out_channels=2 * current_n_filters,
shape=current_shape,
)
)
# Double the number of filters:
current_n_filters = 2 * current_n_filters
# Cut the shape in half:
current_shape = [cs // 2 for cs in current_shape]
self.head = nn.Sequential(
nn.Flatten(),
nn.LayerNorm(current_n_filters),
nn.Linear(current_n_filters, 10),
)
# self.norm2 = nn.InstanceNorm2d(current_n_filters)
# # This brings it down to one channel / class
# self.bottleneck = nn.Conv2d(in_channels=current_n_filters, out_channels=10,
# kernel_size=1, stride=1)
def forward(self, x):
x = self.stem(x)
# Apply a normalization after the initial patching:
x = self.norm1(x)
# Apply the main chunk of the network:
x = self.layers(x)
# Normalize and readout:
x = nn.functional.avg_pool2d(x, x.shape[2:])
x = self.head(x)
return x
# x = self.norm2(x)
# x = self.bottleneck(x)
# # Average pooling of the remaining spatial dimensions (and reshape) makes this label-like:
# return nn.functional.avg_pool2d(x, kernel_size=x.shape[-2:]).reshape((-1,10))========================================================================================== Layer (type:depth-idx) Output Shape Param # ========================================================================================== Classifier [16, 10] -- ├─Conv2d: 1-1 [16, 32, 32, 32] 128 ├─LayerNorm: 1-2 [16, 32, 32, 32] 65,536 ├─Sequential: 1-3 [16, 256, 4, 4] -- │ └─ConvNextBlock: 2-1 [16, 32, 32, 32] -- │ │ └─Conv2d: 3-1 [16, 32, 32, 32] 160 │ │ └─LayerNorm: 3-2 [16, 32, 32, 32] 65,536 │ │ └─Conv2d: 3-3 [16, 128, 32, 32] 4,224 │ │ └─Conv2d: 3-4 [16, 32, 32, 32] 4,128 │ └─ConvNextBlock: 2-2 [16, 32, 32, 32] -- │ │ └─Conv2d: 3-5 [16, 32, 32, 32] 160 │ │ └─LayerNorm: 3-6 [16, 32, 32, 32] 65,536 │ │ └─Conv2d: 3-7 [16, 128, 32, 32] 4,224 │ │ └─Conv2d: 3-8 [16, 32, 32, 32] 4,128 │ └─Downsampler: 2-3 [16, 64, 16, 16] -- │ │ └─LayerNorm: 3-9 [16, 32, 32, 32] 65,536 │ │ └─Conv2d: 3-10 [16, 64, 16, 16] 8,256 │ └─ConvNextBlock: 2-4 [16, 64, 16, 16] -- │ │ └─Conv2d: 3-11 [16, 64, 16, 16] 320 │ │ └─LayerNorm: 3-12 [16, 64, 16, 16] 32,768 │ │ └─Conv2d: 3-13 [16, 256, 16, 16] 16,640 │ │ └─Conv2d: 3-14 [16, 64, 16, 16] 16,448 │ └─ConvNextBlock: 2-5 [16, 64, 16, 16] -- │ │ └─Conv2d: 3-15 [16, 64, 16, 16] 320 │ │ └─LayerNorm: 3-16 [16, 64, 16, 16] 32,768 │ │ └─Conv2d: 3-17 [16, 256, 16, 16] 16,640 │ │ └─Conv2d: 3-18 [16, 64, 16, 16] 16,448 │ └─Downsampler: 2-6 [16, 128, 8, 8] -- │ │ └─LayerNorm: 3-19 [16, 64, 16, 16] 32,768 │ │ └─Conv2d: 3-20 [16, 128, 8, 8] 32,896 │ └─ConvNextBlock: 2-7 [16, 128, 8, 8] -- │ │ └─Conv2d: 3-21 [16, 128, 8, 8] 640 │ │ └─LayerNorm: 3-22 [16, 128, 8, 8] 16,384 │ │ └─Conv2d: 3-23 [16, 512, 8, 8] 66,048 │ │ └─Conv2d: 3-24 [16, 128, 8, 8] 65,664 │ └─ConvNextBlock: 2-8 [16, 128, 8, 8] -- │ │ └─Conv2d: 3-25 [16, 128, 8, 8] 640 │ │ └─LayerNorm: 3-26 [16, 128, 8, 8] 16,384 │ │ └─Conv2d: 3-27 [16, 512, 8, 8] 66,048 │ │ └─Conv2d: 3-28 [16, 128, 8, 8] 65,664 │ └─Downsampler: 2-9 [16, 256, 4, 4] -- │ │ └─LayerNorm: 3-29 [16, 128, 8, 8] 16,384 │ │ └─Conv2d: 3-30 [16, 256, 4, 4] 131,328 │ └─ConvNextBlock: 2-10 [16, 256, 4, 4] -- │ │ └─Conv2d: 3-31 [16, 256, 4, 4] 1,280 │ │ └─LayerNorm: 3-32 [16, 256, 4, 4] 8,192 │ │ └─Conv2d: 3-33 [16, 1024, 4, 4] 263,168 │ │ └─Conv2d: 3-34 [16, 256, 4, 4] 262,400 │ └─ConvNextBlock: 2-11 [16, 256, 4, 4] -- │ │ └─Conv2d: 3-35 [16, 256, 4, 4] 1,280 │ │ └─LayerNorm: 3-36 [16, 256, 4, 4] 8,192 │ │ └─Conv2d: 3-37 [16, 1024, 4, 4] 263,168 │ │ └─Conv2d: 3-38 [16, 256, 4, 4] 262,400 ├─Sequential: 1-4 [16, 10] -- │ └─Flatten: 2-12 [16, 256] -- │ └─LayerNorm: 2-13 [16, 256] 512 │ └─Linear: 2-14 [16, 10] 2,570 ========================================================================================== Total params: 2,003,914 Trainable params: 2,003,914 Non-trainable params: 0 Total mult-adds (Units.GIGABYTES): 1.20 ========================================================================================== Input size (MB): 0.20 Forward/backward pass size (MB): 129.53 Params size (MB): 8.02 Estimated Total Size (MB): 137.75 ==========================================================================================
def evaluate(dataloader, model, loss_fn, val_bar):
# Set the model to evaluation mode - some NN pieces behave differently during training
# Unnecessary in this situation but added for best practices
model.eval()
size = len(dataloader)
num_batches = len(dataloader)
loss, correct = 0, 0
# We can save computation and memory by not calculating gradients here - we aren't optimizing
with torch.no_grad():
# loop over all of the batches
for x, y in dataloader:
t0 = time.perf_counter()
pred = model(x.to(DTYPE))
t1 = time.perf_counter()
loss += loss_fn(pred, y).item()
# how many are correct in this batch? Tracking for accuracy
correct += (pred.argmax(1) == y).type(torch.float).sum().item()
t3 = time.perf_counter()
val_bar.update()
loss /= num_batches
correct /= size * batch_size
accuracy = 100 * correct
return accuracy, lossdef eval_step(x, y):
with torch.no_grad():
t0 = time.perf_counter()
pred = model(x.to(DTYPE))
t1 = time.perf_counter()
loss = loss_fn(pred, y).item()
correct = (pred.argmax(1) == y).type(torch.float).sum().item()
t2 = time.perf_counter()
return {
"loss": loss,
"acc": correct / y.shape[0],
"dtf": t1 - t0,
"dtm": t2 - t1,
}def train_step(x, y):
t0 = time.perf_counter()
# Forward pass
with torch.autocast(dtype=DTYPE, device_type=DEVICE):
pred = model(x.to(DTYPE))
loss = loss_fn(pred, y)
t1 = time.perf_counter()
# Backward pass
loss.backward()
t2 = time.perf_counter()
# Update weights
optimizer.step()
t3 = time.perf_counter()
# Reset gradients
optimizer.zero_grad()
t4 = time.perf_counter()
return loss.item(), {
"dtf": t1 - t0,
"dtb": t2 - t1,
"dtu": t3 - t2,
"dtz": t4 - t3,
}def train_one_epoch(
dataloader, model, loss_fn, optimizer, progress_bar, history: ezpz.History | None
):
model.train()
t0 = time.perf_counter()
batch_metrics = {}
for batch, (X, y) in enumerate(dataloader):
loss, metrics = train_step(x, y)
progress_bar.update()
metrics = {"bidx": batch, "loss": loss, **metrics}
batch_metrics[batch] = metrics
if history is not None:
print(history.update(metrics))
t1 = time.perf_counter()
batch_metrics |= {"dt_batch": t1 - t0}
# if history is not None:
# _ = history.update({"dt_batch": t1 - t0})
return batch_metricsdef train_one_epoch1(
dataloader, model, loss_fn, optimizer, progress_bar, history: ezpz.History | None
):
model.train()
t0 = time.perf_counter()
batch_metrics = {}
for batch, (X, y) in enumerate(dataloader):
_t0 = time.perf_counter()
# forward pass
pred = model(X)
_t1 = time.perf_counter()
loss = loss_fn(pred, y)
_t2 = time.perf_counter()
# backward pass calculates gradients
loss.backward()
_t3 = time.perf_counter()
# take one step with these gradients
optimizer.step()
_t4 = time.perf_counter()
# resets the gradients
optimizer.zero_grad()
_t5 = time.perf_counter()
progress_bar.update()
metrics = {
"bidx": batch,
"loss": loss.item(),
"dtf": (_t1 - _t0),
"dtl": (_t2 - _t1),
"dtb": (_t3 - _t2),
"dto": (_t4 - _t3),
"dtz": (_t5 - _t4),
}
batch_metrics[batch] = metrics
if history is not None:
summary = history.update(metrics)
t1 = time.perf_counter()
batch_metrics |= {
"dt_batch": t1 - t0,
}
return batch_metrics{'loss': 2.40625, 'acc': 0.125, 'dtf': 0.1633995003066957, 'dtm': 0.0010725418105721474}
print(f"{_x.shape=}, {_y.shape=}")
_pred = model(_x.to(DTYPE))
_loss = loss_fn(_pred, _y).item()
_correct = (_pred.argmax(1) == _y).type(torch.float).sum().item()
print(
{
# "pred": _pred,
"loss": _loss,
"pred.argmax(1)": _pred.argmax(1),
"pred.argmax(1) == y": (_pred.argmax(1) == _y),
"correct": _correct,
"acc": _correct / _y.shape[0],
}
)_x.shape=torch.Size([16, 3, 32, 32]), _y.shape=torch.Size([16])
{ 'loss': 2.40625, 'pred.argmax(1)': tensor([2, 2, 4, 2, 2, 2, 2, 2, 2, 2, 4, 2, 4, 4, 2, 2]), 'pred.argmax(1) == y': tensor([False, False, False, False, True, False, True, False, False, False, False, False, False, False, False, False]), 'correct': 2.0, 'acc': 0.125 }
Run Training
import time
import ezpz
from tqdm.auto import tqdm, trange
PRINT_EVERY = 50
TRAIN_ITERS = 500
history = ezpz.History()
model.train()
for i in trange(TRAIN_ITERS, desc="Training"):
t0 = time.perf_counter()
x, y = next(iter(train_dataloader))
t1 = time.perf_counter()
loss, dt = train_step(x, y)
summary = history.update(
{
"train/iter": i,
"train/loss": loss,
"train/dtd": t1 - t0,
**{f"train/{k}": v for k, v in dt.items()},
},
).replace("/", ".")
if i % PRINT_EVERY == 0:
print(summary)train.iter=0 train.loss=2.515625 train.dtd=0.010065 train.dtf=0.171240 train.dtb=0.713570 train.dtu=0.013012 train.dtz=0.000208
train.iter=50 train.loss=1.953125 train.dtd=0.002513 train.dtf=0.146031 train.dtb=0.657839 train.dtu=0.008844 train.dtz=0.000213
train.iter=100 train.loss=2.031250 train.dtd=0.002231 train.dtf=0.140829 train.dtb=0.657641 train.dtu=0.008523 train.dtz=0.000480
train.iter=150 train.loss=2.125000 train.dtd=0.001999 train.dtf=0.145267 train.dtb=0.679628 train.dtu=0.008671 train.dtz=0.000192
train.iter=200 train.loss=1.890625 train.dtd=0.002067 train.dtf=0.141468 train.dtb=0.656727 train.dtu=0.008663 train.dtz=0.000650
train.iter=250 train.loss=1.984375 train.dtd=0.002972 train.dtf=0.138405 train.dtb=0.662314 train.dtu=0.008473 train.dtz=0.000427
train.iter=300 train.loss=2.281250 train.dtd=0.001965 train.dtf=0.149045 train.dtb=0.649204 train.dtu=0.008485 train.dtz=0.000199
train.iter=350 train.loss=1.851562 train.dtd=0.002693 train.dtf=0.149543 train.dtb=0.677236 train.dtu=0.008860 train.dtz=0.000135
train.iter=400 train.loss=1.812500 train.dtd=0.002285 train.dtf=0.136938 train.dtb=0.683250 train.dtu=0.008446 train.dtz=0.000188
train.iter=450 train.loss=2.265625 train.dtd=0.002329 train.dtf=0.149435 train.dtb=0.653462 train.dtu=0.008714 train.dtz=0.000223
Run Validation
eval_history = ezpz.History()
model.eval()
PRINT_EVERY = 50
# EVAL_ITERS = 50
with torch.no_grad():
for bidx, (x, y) in enumerate(tqdm(val_dataloader)):
t0 = time.perf_counter()
pred = model(x.to(DTYPE))
loss = loss_fn(pred, y).item()
correct = (pred.argmax(1) == y).to(torch.float).sum().item()
acc = correct / y.shape[0]
metrics = {
"val/iter": bidx,
"val/loss": loss,
"val/acc": acc,
}
summary = eval_history.update(metrics)
if bidx % PRINT_EVERY == 0:
print(summary)val/iter=0 val/loss=1.734375 val/acc=0.312500
val/iter=50 val/loss=1.664062 val/acc=0.437500
val/iter=100 val/loss=1.882812 val/acc=0.312500
val/iter=150 val/loss=1.609375 val/acc=0.562500
val/iter=200 val/loss=1.921875 val/acc=0.250000
val/iter=250 val/loss=1.609375 val/acc=0.437500
val/iter=300 val/loss=1.484375 val/acc=0.562500
val/iter=350 val/loss=1.617188 val/acc=0.437500
val/iter=400 val/loss=2.218750 val/acc=0.125000
val/iter=450 val/loss=1.484375 val/acc=0.437500
val/iter=500 val/loss=1.781250 val/acc=0.250000
val/iter=550 val/loss=1.687500 val/acc=0.375000
val/iter=600 val/loss=1.609375 val/acc=0.437500
Plot Metrics
Training Metrics








Validation Metrics




Homework 1
In this notebook, we’ve learned about some basic convolutional networks and trained one on CIFAR-10 images. It did … OK. There is significant overfitting of this model. There are some ways to address that, but we didn’t have time to get into that in this session.
Meanwhile, your homework (part 1) for this week is to try to train the model again but with a different architecture. Change one or more of the following: - The number of convolutions between downsampling - The number of filters in each layer - The initial “patchify” layer - Another hyper-parameter of your choosing
And compare your final validation accuracy to the accuracy shown here. Can you beat the validation accuracy shown?
For full credit on the homework, you need to show (via text, or make a plot) the training and validation data sets’ performance (loss and accuracy) for all the epochs you train. You also need to explain, in several sentences, what you changed in the network and why you think it makes a difference.
Training for Multiple Epochs
epochs = 1
train_history = ezpz.History()
for j in range(epochs):
with tqdm(
total=len(train_dataloader), position=0, leave=True, desc=f"Train Epoch {j}"
) as train_bar:
bmetrics = train_one_epoch(
train_dataloader,
model,
loss_fn,
optimizer,
train_bar,
history=train_history,
)
# checking on the training & validation loss & accuracy
# for training data - only once every 5 epochs (takes a while)
if j % 5 == 0:
with tqdm(
total=len(train_dataloader),
position=0,
leave=True,
desc=f"Validate (train) Epoch {j}",
) as train_eval:
acc, loss = evaluate(train_dataloader, model, loss_fn, train_eval)
print(f"Epoch {j}: training loss: {loss:.3f}, accuracy: {acc:.3f}")
with tqdm(
total=len(val_dataloader), position=0, leave=True, desc=f"Validate Epoch {j}"
) as val_bar:
acc_val, loss_val = evaluate(val_dataloader, model, loss_fn, val_bar)
print(
f"Epoch {j}: validation loss: {loss_val:.3f}, accuracy: {acc_val:.3f}"
)Citation
@online{foreman2025,
author = {Foreman, Sam and Foreman, Sam and Zheng, Huihuo and Adams,
Corey and Lusch, Bethany},
title = {Convolutional {Neural} {Networks}},
date = {2025-07-22},
url = {https://saforem2.github.io/hpc-bootcamp-2025/01-neural-networks/3-conv-nets/},
langid = {en}
}